Introduzione
Il Global Positioning System (GPS) è una tecnologia pervasiva, presente in smartphone, sistemi di navigazione, droni, wearable e infrastrutture critiche. Nato negli anni ’70 come progetto del Dipartimento della Difesa degli Stati Uniti, oggi è parte di un ecosistema più ampio (GNSS – Global Navigation Satellite Systems) che fornisce posizionamento, navigazione e sincronizzazione temporale con elevata affidabilità.
Questo articolo esamina i principi di funzionamento, le costellazioni alternative, la struttura dei moduli GPS/GNSS, l’interfacciamento con microcontrollori e lo standard NMEA 0183, includendo tecniche di precisione (A-GPS, SBAS, RTK) e considerazioni pratiche d’integrazione.
Il sistema GPS: origini e caratteristiche
Il GPS diventa pienamente operativo nel 1995 con almeno 24 satelliti attivi su 6 piani orbitali a circa 20.200 km di altitudine. Ogni satellite completa due orbite al giorno ed è dotato di orologi atomici ad alta stabilità. I segnali radio sono trasmessi su più bande.
I satelliti GPS trasmettono su diverse bande di frequenza. La più nota è la L1 (1575.42 MHz), storicamente la più utilizzata in ambito civile. Accanto a questa esiste la L2 (1227.60 MHz), inizialmente riservata ad applicazioni militari ma oggi sfruttata anche per tecniche di correzione come l’RTK. Infine, la più recente L5 (1176.45 MHz) è dedicata alle applicazioni civili che richiedono massima precisione e affidabilità, come l’aviazione.La posizione è calcolata via trilaterazione: misurando il tempo di propagazione del segnale da più satelliti e conoscendo la velocità della luce, il ricevitore ricava la distanza da ciascun satellite. Con almeno quattro satelliti si ottengono latitudine, longitudine, altitudine e correzione dell’orologio interno.
Aspetto fondamentale: le correzioni relativistiche. Differenze di gravità e velocità orbitale farebbero divergere gli orologi a bordo rispetto a quelli a Terra; senza tali correzioni, gli errori di posizione accumulerebbero chilometri al giorno.
GNSS: oltre il GPS
Oltre al GPS, sono operative altre costellazioni: GLONASS (Russia), Galileo (UE), BeiDou (Cina) e i sistemi regionali QZSS (Giappone) e NavIC (India). I ricevitori moderni sono tipicamente multi-costellazione e combinano segnali eterogenei per migliorare precisione, robustezza e tempi di fix.
In aggiunta operano i sistemi di correzione satellitare SBAS come WAAS (USA) ed EGNOS (Europa), che riducono ulteriormente gli errori tramite messaggi di correzione differenziale.
Precisione e tecniche avanzate
In condizioni standard un ricevitore consumer ha una precisione di circa 2–5 metri. L’utilizzo di tecniche correttive come il DGPS riduce l’errore a 1–3 metri. Con sistemi avanzati come l’RTK, che sfrutta la fase della portante, è possibile raggiungere precisioni centimetrice. Infine, l’A-GPS, utilizzato comunemente negli smartphone, consente di ridurre drasticamente i tempi di fix iniziali scaricando le informazioni orbitali tramite rete cellulare o Internet.
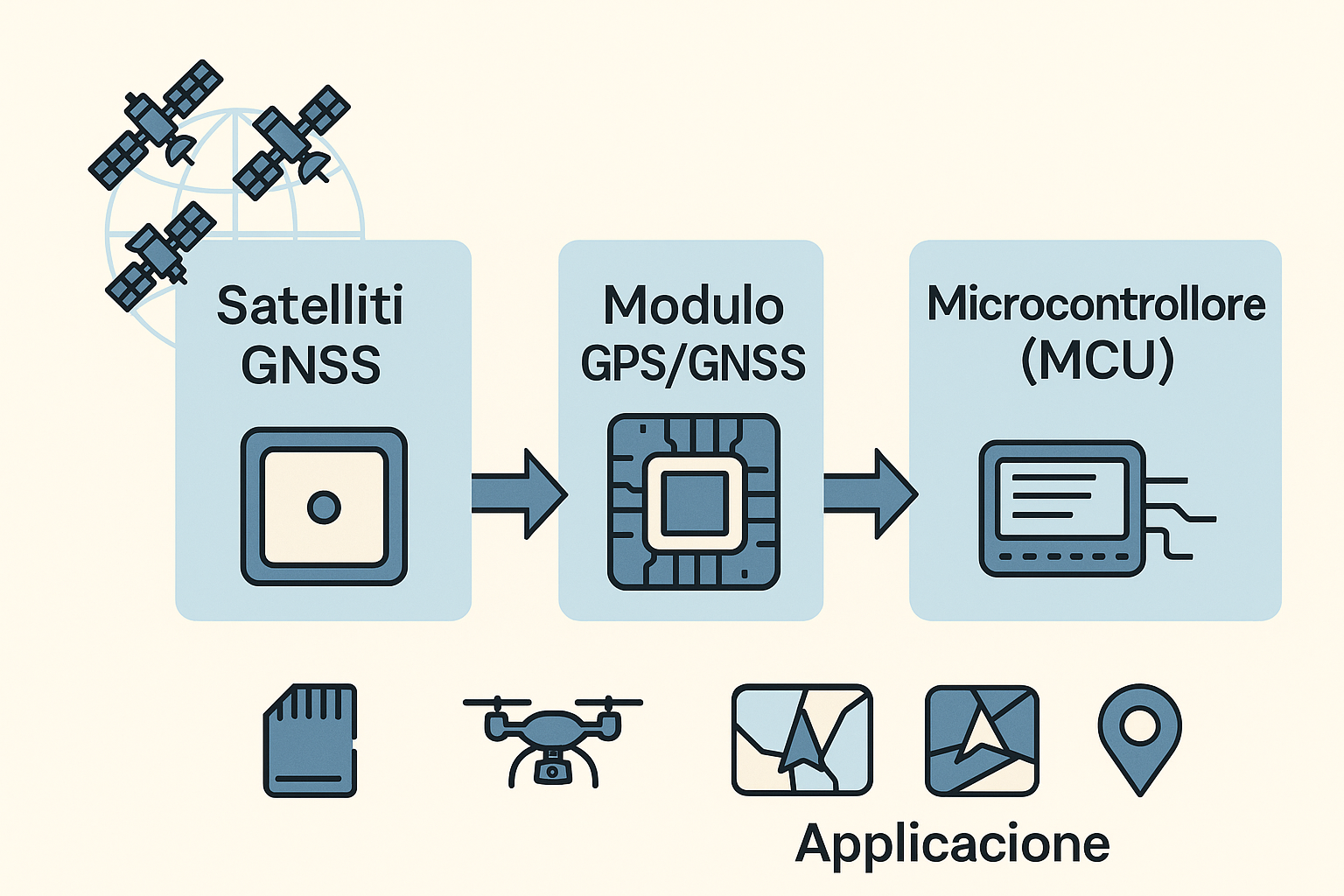
Architettura elettronica di un modulo GPS/GNSS
Un tipico modulo GPS/GNSS è costituito da più elementi integrati. L’antenna, che può essere una patch ceramica o una soluzione attiva con amplificatore a basso rumore, riceve segnali estremamente deboli, dell’ordine di −130 dBm. Questi passano attraverso il front-end RF, che provvede al filtraggio e all’amplificazione. Successivamente il processore baseband demodula e decodifica i segnali, calcolando la posizione. Una memoria interna conserva i dati orbitali per ridurre i tempi di avvio, mentre diverse interfacce di comunicazione (UART, I²C, SPI, USB, Bluetooth) permettono di collegare il modulo a microcontrollori o sistemi più complessi.

Moduli GPS/GNSS diffusi
- u-blox Neo-6M: economico, affidabile, UART 9600 baud; precisione ~2.5 m.
- u-blox Neo-M8N: multi-costellazione (GPS/GLONASS/Galileo/BeiDou), TTFF ridotto; popolare nei droni.
- Quectel L80: antenna patch integrata e consumi contenuti per dispositivi a batteria.
- MediaTek MT3339: soluzione low-cost fino a 66 canali; molto usata in tracker.
Interfacciamento con microcontrollori (MCU)
Il collegamento tipico avviene via UART: VCC (3.3/5 V), GND, TX del modulo → RX della MCU, RX del modulo → TX della MCU (opzionale). Moduli con USB, I²C o SPI sono disponibili quando servono requisiti diversi (ad es. throughput, consumo o semplicità di collegamento a PC).
Sequenza operativa: accensione → ricerca satelliti → fix (cold start: fino a 1–2 min; warm/hot start: pochi secondi) → output continuo delle sentence NMEA per posizione, velocità, altitudine e ora UTC.
Protocollo NMEA 0183
Lo standard NMEA 0183 definisce messaggi ASCII (“sentence”) inviati tipicamente a
9600 baud (alcuni moduli supportano velocità più alte come 115200 baud). Ogni frase inizia con
il carattere $, ha campi separati da virgole e termina con un checksum esadecimale
preceduto da *. Molti moduli consentono di selezionare quali sentence trasmettere per ridurre il carico
computazionale del sistema.
Esempio GPGGA
$GPGGA,123519,4807.038,N,01131.000,E,1,08,0.9,545.4,M,46.9,M,,*47Ora UTC = 12:35:19; Lat = 48°07.038’ N; Lon = 11°31.000’ E; Fix = valido (1); Satelliti = 8; HDOP = 0.9; Altitudine = 545.4 m; separazione geoidale = 46.9 m.
Sentence principali
| Sentence | Significato | Informazioni |
|---|---|---|
$GPGGA |
Fix Data | Ora, posizione, altitudine, satelliti, HDOP |
$GPRMC |
Recommended Minimum | Stato fix, posizione, velocità, rotta |
$GPGSV |
Satelliti in vista | Numero, elevazione, azimut, SNR |
$GPGSA |
DOP & Active Satellites | PDOP, HDOP, VDOP, satelliti usati |
$GPVTG |
Track & Ground Speed | Direzione e velocità rispetto al suolo |
Limiti e sfide
- Multipath in ambito urbano (riflessioni su edifici).
- Scarsa copertura indoor (gallerie, edifici, sotterranei).
- TTFF elevato senza A-GPS o memorie di efemeridi.
- Vulnerabilità a jamming e spoofing.
Applicazioni
Le applicazioni dei sistemi GNSS sono ormai ubiquitarie. Oltre alla navigazione terrestre, marittima e aerea, i moduli GPS sono alla base del tracciamento di flotte e asset, così come del controllo dei droni e dei sistemi robotici autonomi. Sono presenti in dispositivi sportivi e outdoor, come smartwatch e tracker, e vengono integrati in data logger embedded per la registrazione dei percorsi. Infine, il GPS svolge un ruolo critico nella sincronizzazione temporale delle telecomunicazioni e delle reti elettriche.
Riferimenti e approfondimenti
Conclusione
Il GPS e, più in generale, i sistemi GNSS, rappresentano un’integrazione esemplare di fisica, elettronica e informatica. Grazie ai moduli multi-costellazione e allo standard NMEA 0183, l’integrazione in sistemi embedded spazia dal semplice data logger fino a soluzioni di navigazione professionali e alla sincronizzazione di infrastrutture critiche.
Dietro la semplicità di una coppia di coordinate si cela un sistema complesso e sofisticato, reso affidabile da correzioni relativistiche, tecniche di miglioramento della precisione e una catena di elaborazione curata in ogni dettaglio.
Hai un progetto da realizzare?
Silicon LogiX mette a disposizione competenze nello sviluppo embedded per l’integrazione di moduli GPS/GNSS in progetti personalizzati. Dalla gestione dei protocolli NMEA all’interfacciamento con microcontrollori e firmware dedicato, fino all’elaborazione e visualizzazione dei dati: l’intero flusso di un progetto basato su GPS può essere seguito con affidabilità e precisione.
Contattami